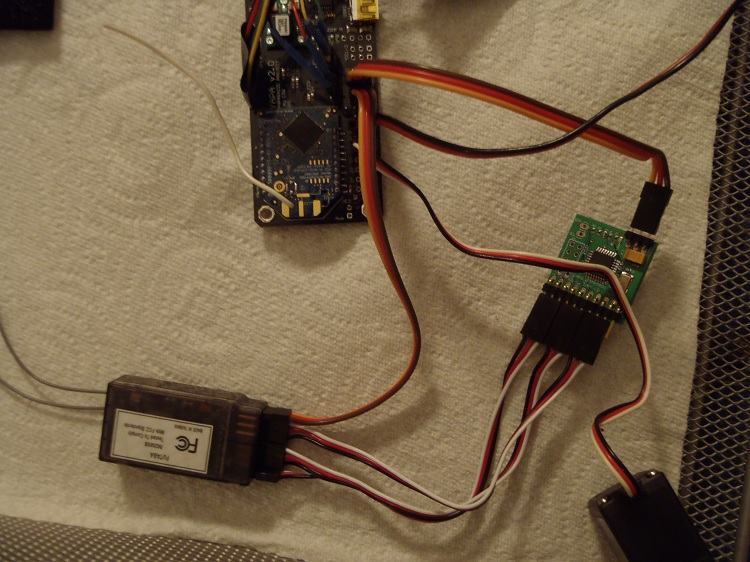
I have everything connected as in the attached figure. I am using a RC Futaba T8FG (14 channels, 2.4GHz), a receiver Futaba R6208SB and the PPM encoder connected to the Yapa.
<!DOCTYPE radio SYSTEM "radio.dtd"> <radio name="cockpitSX (easy)" data_min="900" data_max="2100" sync_min ="5000" sync_max ="15000" pulse_type="POSITIVE">
<channel ctl="A" function="ROLL" max="2050" neutral="1500" min="950" average="0"/> <channel ctl="B" function="PITCH" min="2050" neutral="1500" max="950" average="0"/>
<channel ctl="C" function="THROTTLE" min="1223" neutral="1223" max="2050" average="0"/> <channel ctl="D" function="YAW" min="2050" neutral="1500" max="950" average="0"/>
<channel ctl="E" function="MODE" min="950" neutral="1500" max="2050" average="1"/> <!-- Top right switch --> <channel ctl="F" function="UNUSED" min="2050" neutral="1500" max="950" average="1"/> <!-- center slider -->
<channel ctl="G" function="GAIN1" min="2050" neutral="1496" max="948" average="1"/> <!-- top right slider --> <channel ctl="H" function="GAIN2" min="2050" neutral="1496" max="948" average="1"/> <!-- top right slider -->
</radio>
I don't get any response from the autopilot when I switch the mode or move the sticks. Does anybody knows how to fix the problem? I think is coming from the codes since the RC-receiver work together and the PPM led is flashing.
{kind=link}