{kind=link}
Description: PNG image
|
| From: | Michal Podhradsky |
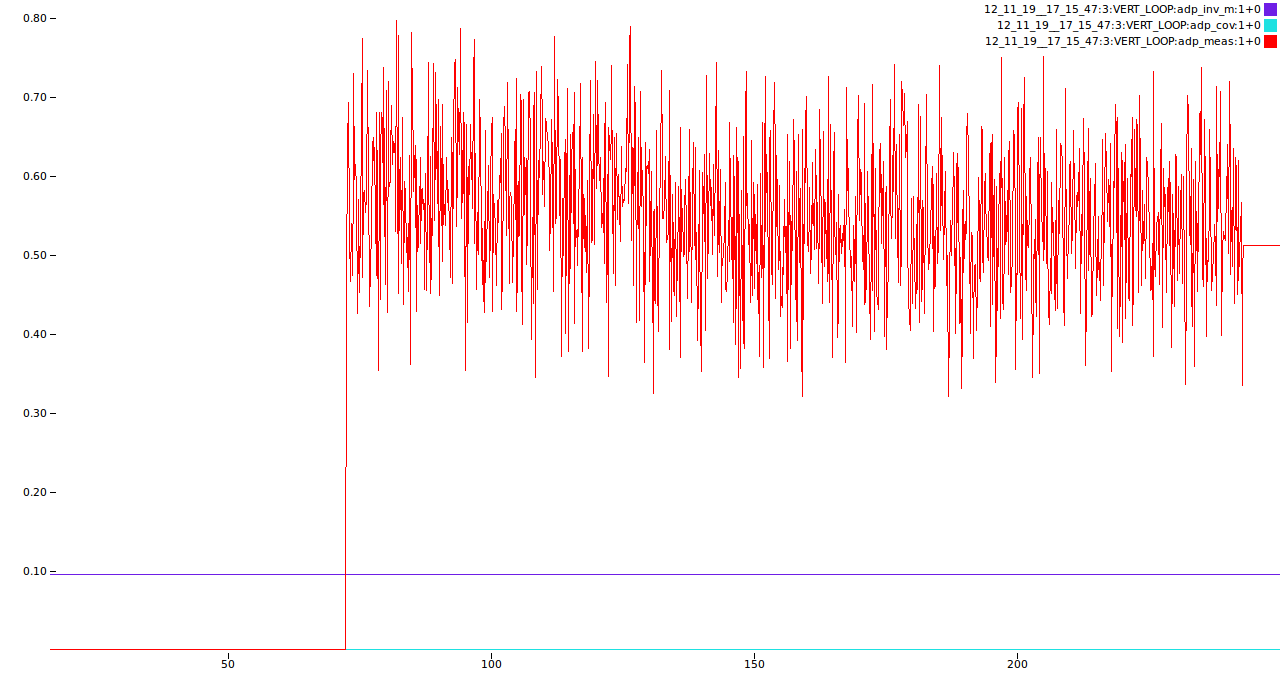
| Subject: | [Paparazzi-devel] Quadrotor, Lia 1.1. + PWM actuators - adaptive thrust estimation does not converge |
| Date: | Mon, 19 Nov 2012 18:14:03 -0700 |
![]() adapt_est.png
adapt_est.png
Description: PNG image
| [Prev in Thread] | Current Thread | [Next in Thread] |