{kind=link}
Description: PNG image
|
| From: | Joseph Muhlhausen |
| Subject: | Re: [Paparazzi-devel] Umarim lite 2.0 gyro going crazy |
| Date: | Fri, 1 Mar 2013 18:47:10 -0500 |
Date: Wed, 27 Feb 2013 17:34:24 -0500
From: Joseph Muhlhausen <address@hidden>
To: address@hidden
Subject: [Paparazzi-devel] Umarim lite 2.0 gyro going crazy
Message-ID:
<address@hidden>
Content-Type: text/plain; charset="iso-8859-1"
Hello everyone,
I was happy to have fixed my interference issue, but when I got home and
wanted to do some tests, the servos started acting crazy in AUTO 1 mode. I
looked at the PFD and it just goes in every direction very quickly. I
tried the different ahrs but it didn't really help.
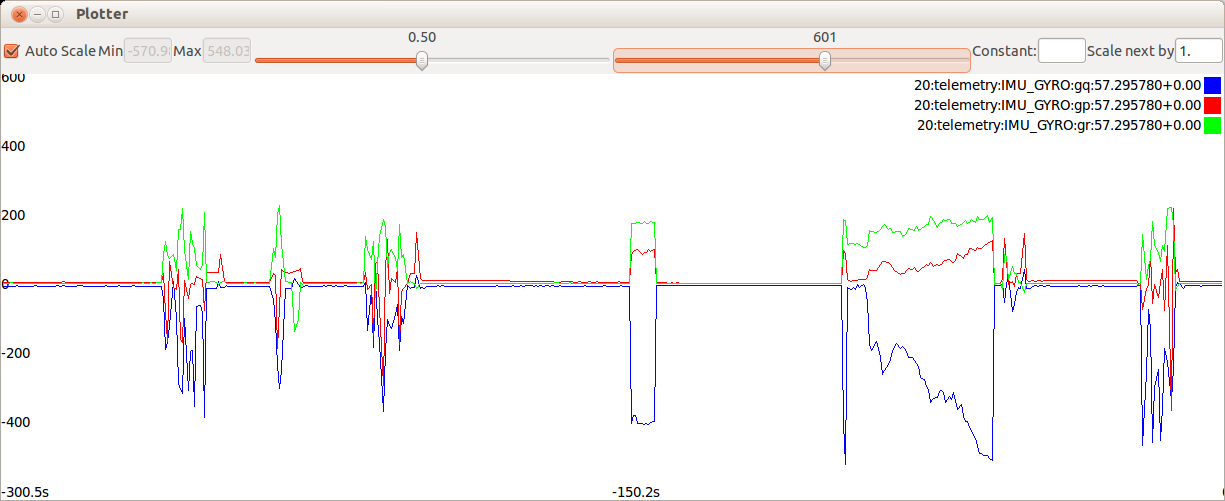
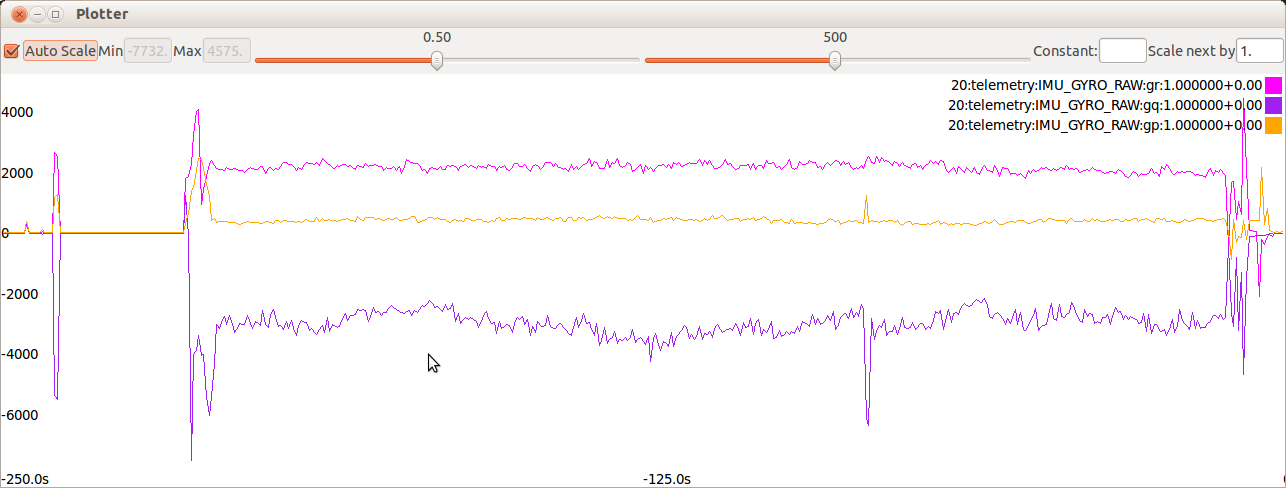
I looked at the raw data, the accelerometer seemed fine. The gyroscope on
the other hand had values between 0 to 10000 while still.
Rotating the board 90, 180, -90, -180 as well as waiting steady for the
gyro to align helped a lot. However when letting the plane still for a long
time I can still see the gyro going off once in a while. I am afraid it'll
do the same in flight.
I saw that Luke had a similar issue but on a stm32 system:
http://lists.gnu.org/archive/html/paparazzi-devel/2011-12/msg00118.html
I would like to try the same solution but I am not sure which function to
use on LPC21/umarim
*
*
Cheers
Joseph
![]() Screenshot from 2013-03-01 18:10:21.png
Screenshot from 2013-03-01 18:10:21.png
Description: PNG image
![]() Screenshot from 2013-03-01 18:29:19.png
Screenshot from 2013-03-01 18:29:19.png
Description: PNG image
| [Prev in Thread] | Current Thread | [Next in Thread] |
{kind=link}