On Sat, Jul 26, 2014 at 1:30 PM, Felix Ruess <address@hidden> wrote:
Hi Steve,as you can see in the schematic the AD0 pin of the MPU is pulled low, meaning that it uses the "default" I2C address.On the drotek this pin is pulled high and it uses the alternative address (defined in mpu60x0_regs.h as MPU60X0_ADDR_ALT).So you can change the address that is set in this driver by default from MPU60X0_ADDR_ALT to MPU60X0_ADDR:<subsystem name="imu" value="drotek_10dof_v2"><define name="DROTEK_2_MPU_I2C_ADDR" value="MPU60X0_ADDR"/></subsystem>Cheers, FelixOn Sat, Jul 26, 2014 at 1:37 AM, Steve D <address@hidden> wrote:
fyi schematics for gy-86
On Fri, Jul 25, 2014 at 6:26 PM, Steve D <address@hidden> wrote:
I actually have 2 separate boards, the gy521 and t gy-86. one board has gy-521 has only mpu-6050 on it. the gy-86 has 3 sensors mounted mpu-6050 MS5611 HMC5883L) with both boards I am getting the same results. unfortunately there is not much info on those boards I do not even know what information I need to look for.when I try to run it with the drotek_10dof_v2 I am unable to get any readings from the board. I get I2c error.
the only success I have had was with the aspririn2_i2c in fixed wing configuration.On Fri, Jul 25, 2014 at 6:09 PM, Felix Ruess <address@hidden> wrote:So what imu board exactly is that? How are the sensors connected?
You can probably use the drotek_10dof_v2 subsystem for MPU (accel, gyro) and mag via i2c...If the MS5611 is also connected via I2C you can use <configure name="LISA_M_BARO" value="BARO_MS5611_I2C"/>On Sat, Jul 26, 2014 at 12:01 AM, Steve D <address@hidden> wrote:
Unfortunately I have the Lisa M without the Aspirin IMU and TR do not have the Asprin IMU in stock. I am using an 10DOF IMU mpu-6050 MS5611 HMC5883L from ebay for now.On Fri, Jul 25, 2014 at 5:54 PM, Felix Ruess <address@hidden> wrote:Then the MPU is connected via SPI anyways and you should just use the aspirin_v2.1 or aspirin_v2.2 subsystem as appropriate...On Fri, Jul 25, 2014 at 11:51 PM, Steve D <address@hidden> wrote:
I am using Lisa M 2.0.On Fri, Jul 25, 2014 at 5:32 PM, Felix Ruess <address@hidden> wrote:
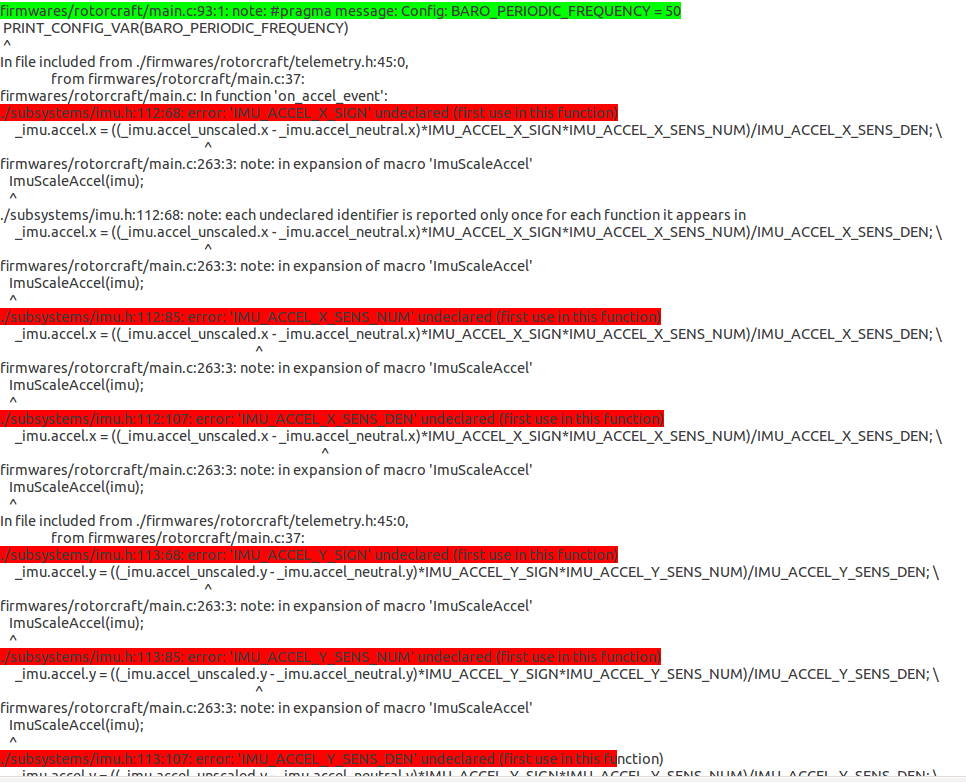
Hi,As the errors say, you are missing some defines for the axes signs and sensitivity, if you want to use that driver...What board are you using?Cheers, FelixOn Fri, Jul 25, 2014 at 11:20 PM, Steve D <address@hidden> wrote:
Hello Felix,Thanks for your help. I pulled the latest stable build, we got passed the original issue. however there were errors recorded.
On Fri, Jul 25, 2014 at 4:52 PM, Felix Ruess <address@hidden> wrote:
Hi,thanks for finding the typo in imu_asprin2, fixed in v5.0 and master...SRC_MODULES was not define for the rotorcraft firmware, also fixed... should now compile.In master you don't need to edit the makefile in order to change the I2C bus.Add <configure name="IMU_ASPIRIN2_I2C_DEV" value="i2c1"/> to the imu subsystem node.Cheers, FelixOn Mon, Jul 21, 2014 at 11:29 PM, Steve D <address@hidden> wrote:
Hello All,I have a similar issue, I also have an MPU-6050 board with lisa M 2.0. I am using V5.0 stable build.First I tried the setup with Bixler.I added<subsystem name="imu" type="aspirin2_i2c"><define name="MPU60X0_ADDR" value="MPU60X0_ADDR_ALT"/></subsystem>there was a minor error imu_aspirin2.c file #include was pointing to an non existing file, there was a typo.#include "../../peripherals/mpu60X0.h" X is in upper case. I just copied and renamed the file and it started working.
I also modified imu_aspirin2_i2c.makefile (I could change the value any other way).changed to I2C value to 1 to match my board setup.IMU_ASPIRIN2_CFLAGS += -DUSE_I2Cifeq ($(ARCH), stm32)IMU_ASPIRIN2_CFLAGS += -DUSE_I2C1IMU_ASPIRIN2_CFLAGS += -DPPZUAVIMU_I2C_DEV=i2c1after these modification I stated getting data from the IMU. I did not make any further testing. I wanted to setup a Quad.Next I tired Quad_lisaM_2 the only line I changed in air frame was <subsystem name="imu" type="aspirin2_i2c"/>it failed to compileCREATING object dir /home/steve/paparazzi/var/Quad_LisaM_2/apmake[1]: *** No rule to make target `/home/steve/paparazzi/var/Quad_LisaM_2/ap/ap.elf', needed by `elf'. Stop.make[1]: Leaving directory `/home/steve/paparazzi/sw/airborne'make: *** [ap.compile] Error 2make: Leaving directory `/home/steve/paparazzi'FAILED 'make -C /home/steve/paparazzi -f Makefile.ac AIRCRAFT=Quad_LisaM_2 PRINT_CONFIG=1 apI also attempted to run it with imu_drotek_10dof_v2 I was unable to get any reading from the board.Thanks a lot for your help, unfortunately I am not a developer or an EE it is beyond my technical ability to fix this.Steveattached are the compile logs files and var/Quad_LisaM_2On Mon, Jul 21, 2014 at 7:18 AM, fsysky <address@hidden> wrote:Hi friends,
I send a same post without subscribe, so I send a new one and delete the old
one.
My single PCB board have MPU-6050 mounted. I'm using int_cmpl_quat ahrs
algorithm.
But sometimes when I put the quad horizon, the PFD screen is hard to recover
to its original position.
I use lisam 2.0, Aspirin 2.2 imu board, default software.
And I have ported PPZ to a new autopilot board, have the same problem.
Do you have any advice to solve this problem?
Thanks!
--
View this message in context: http://lists.paparazziuav.org/PFD-related-problem-tp15843.html
Sent from the paparazzi-devel mailing list archive at Nabble.com.
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel