{kind=link}
Description: JPEG image
|
| From: | Helge Walle |
| Subject: | Re: [Paparazzi-devel] STM32 and GPS reception. |
| Date: | Sat, 21 Jan 2017 19:45:30 +0100 |
Hi,
Extra suggestion, place the GPS in a wing and the RC in the other one.
Gautier
Le 03/01/2017 à 22:12, Helge Walle a écrit :
Thanks Heinrich,
Making the GPS cable longer will allow me to put the unit vertical and move it forwards.I have spare length on the telemetry cable, so I can experiment with moving the XBee rearwards.Now I have much I can try.
Helge.
2017-01-03 21:20 GMT+01:00 Prof. Dr.-Ing. Heinrich Warmers <address@hidden>:
Hi Helge,______________________________
i think the helix antenna must be in the vertical position.
The antenna is to near to the telemetry antenna.
Please put the telemetry module near the in the ventilation hole in the back side of the fuselage.
This is better for the RC-reciever as for the GPS-module.
The transceiver Antenna has to be much away as possible from the receiver antennas GPS- and RC- receivers.
regards Heinrich
Am 03.01.2017 18:57, schrieb Helge Walle:Thank you for your kind reply and good advice, Heinrich.
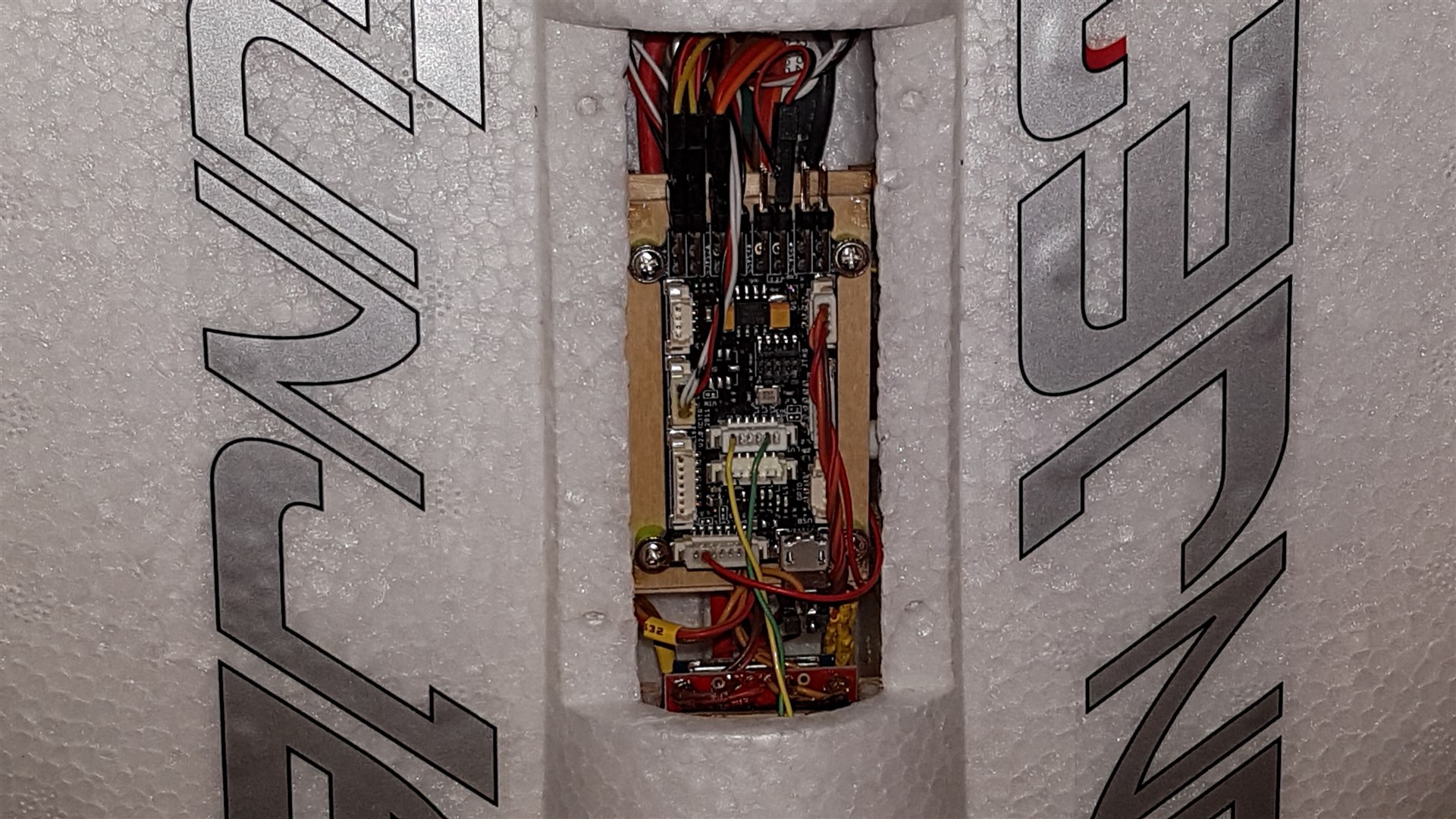
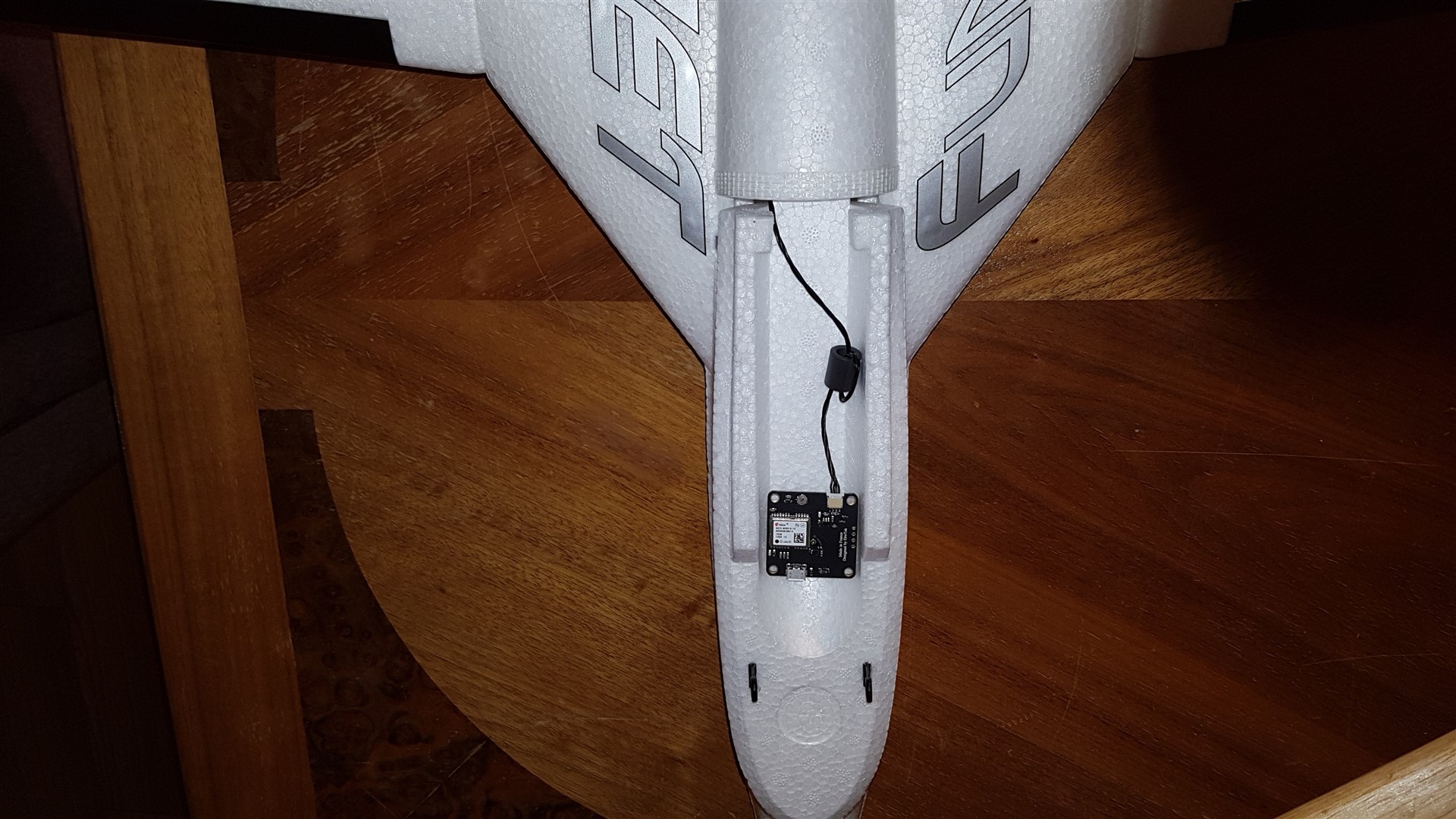
On the attached photo, the location of the autopilot is not easy to change. But this is a project under construction and all the other paparazzi components can be moved to other locations in the plane.
The RC receiver is placed 2-3cm in front of the Lisa/M. And the XBee is approx 8-9cm in front of the RC receiver. Opinions on this are very welcome.
The wiring shown is not permanent, and things look a bit messy at the moment :-|
If I lengthen the GPS cable I can make room for the unit at the front of the vehicle. Maybe it will help... and I have some ferrite rings that I can use. But I want to test this before I cut into the foam.
Still, not knowing for certain the origin of the noise, and whether it is carried by wire or through air, is a bit frustrating. I tried some measurements with my 50MHz oscilloscope, but could not reveal anything useful.
To try and get more knowledge about how the noise is transmitted, I would like to make a galvanic isolated link between the GPS and the board (for testing only). The easiest way to achieve this (i think) is to use opto isolators for RX and TX, and, a separate battery for the GPS.
Thanks,Helge.
2017-01-03 10:32 GMT+01:00 Prof. Dr.-Ing. Heinrich Warmers <address@hidden>:
______________________________
Hi Helge Walle,
we know at a long time period that the STM32 has much more noise than the LPC2148.
The periphery on the LPC2148 works only with 8MHz the core with 60 MHz.
Therefore we fly the wing aircraft only with the old Twog and Tiny13.
The Tiny13 is the best but has an old GPS module.
With the NARZE 32 (STM32103) i hat many problems wit the GPS I get only a fix when i use a lage distance 40cm away from the autopilot pcb.
Try the following:
1. use ferrite rings for all wires from and to the autopilot PCB.
2. capsule the autopilot with aluminium film
3. keep the GPS module far away from the telemetrie antenna and the motor electronic.
4. If you use plan antenna keep a balsa wood plate covert with aluminium film under the GPS module (after that we hat 3dB more).
5. Use a GPS module with active filter between the antenna an the receiver. A club member make a new GPS module with the Neo8 and a filter an had often an error below 1m.
The last point use a lower periphery clock for the STM32. This take a lot of work.
If you have 6 satellite revived (38dB and more) there is no problem in Norway.
Please send me photos of you aircraft and the wireing.
regards Heinrich
Am 02.01.2017 18:17, schrieb Helge Walle:Helge.Thanks,Are there any settings on the STM32F1/4 that could be helpful in reducing the noise?Before I continue with this, does anyone have any knowledge that would help? There is a thread on the mailing list from 2012, but I couldn't find anything very helpful there.Shielding of the board is something I hesitate to try, because it makes everything more difficult when connecting and disconnecthing peripherals.Searching the net, I found a forum where it was claimed that the interference has something to do with cyclic reading of the STM32 flash. However I cannot confirm this myself.I am planning on connecting the GPS via an optical coupler, or even try a wireless connection to see if the interference is reduced. This would anyway be just for testing because of the added complexity. I am not sure if the interference is carried through the connection leads, or via air or both. Does anyone know this?I tried longer leads, up to 1m. Reception got better, but by far not as good as with the Twog or a PC. Also I tried ferrite rings with better, but not good results. Longer leads combined with ferrite rings brought things close to ok. But then again my plane is small...When I connect the same GPS's to the STM32 boards, the reception is noticeably worse, not consistent, and it may take several minutes to get a fix, even outdoors.When I connect my GPS receivers to either the Twog or my PC, the fix happens very quickly, and I get approx 6m accuracy outdoors. And, most important, the results are consistent.I am not sure if the reception quality is influenced by me living 62 degrees north (Norway).Hello paparazzi community, and happy new year!Lately I have been trying to get a satisfactory GPS reception with my STM32 based autopilots, but without success. The two STM32 based boards I have, are a Lisa/M v2.0 and one Elle0. In addition I have an old Twog (LPC2148) to compare with. I have three different GPS's from different vendors, all Ublox5 or Ublox6. The one used most for testing is an Ublox5 receiver with Sarantel antenna (bought from PPZUAV).
_______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailm an/listinfo/paparazzi-devel _________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailm an/listinfo/paparazzi-devel _______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailm an/listinfo/paparazzi-devel _________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailm an/listinfo/paparazzi-devel _______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/ mailman/listinfo/paparazzi- devel
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi- devel
![]() 20170121_183650.jpg
20170121_183650.jpg
Description: JPEG image
![]() 20170121_183742.jpg
20170121_183742.jpg
Description: JPEG image
![]() 20170121_184005.jpg
20170121_184005.jpg
Description: JPEG image
| [Prev in Thread] | Current Thread | [Next in Thread] |
{kind=link}
{kind=link}