Hi Jorge
I tested your airframe file as received on my TWOG, and the GCS was not populated.<define name="MEASURE_AIRSPEED"/> not needed,
plus the lines for the chimu.
I use branch v4.2.
2013/6/20 Jorge Pantoja <address@hidden>
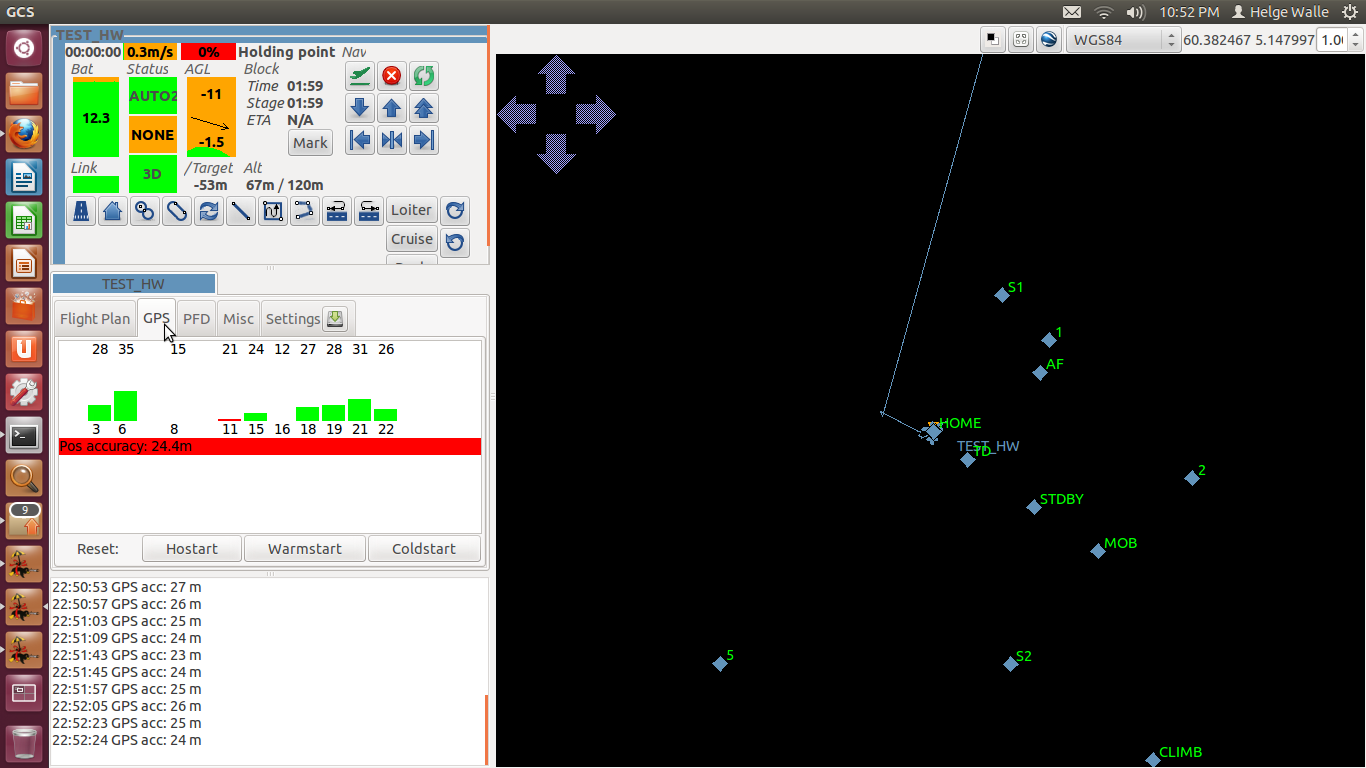
Hello Helge and Eduardo,Thank you so much for your reply. Please, find attached the airframe file I am using. I tried what Eduardo suggested and this is what I am getting: The autopilot board turns on and after a second it freezes as seen in the picture I attached. As you can see, the airspeed sensor and the board are turned on and only the autopilot board is frozen.Also, I tried switching the I2C0 port to I2C1 on the code by adding under the airspeed_ets.xml module:<define name="AIRSPEED_ETS_I2C_DEV" value="i2c1"/>And under the firmware:<define name="USE_I2C1"/>This change made that the autopilot and the sensor to appear to be working fine. I mean, once I used the I2C1 instead of the I2C0 port the autopilot didn't freeze but I still didn't get the AIRSPEED_ETS message on my log file. Also, changing to the I2C1 port didn't require the pull-up resistors. This makes me wonder if I am using the correct I2C port again.Please let me know your thoughts.
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
{kind=link}
{kind=link}