Hi Michal,
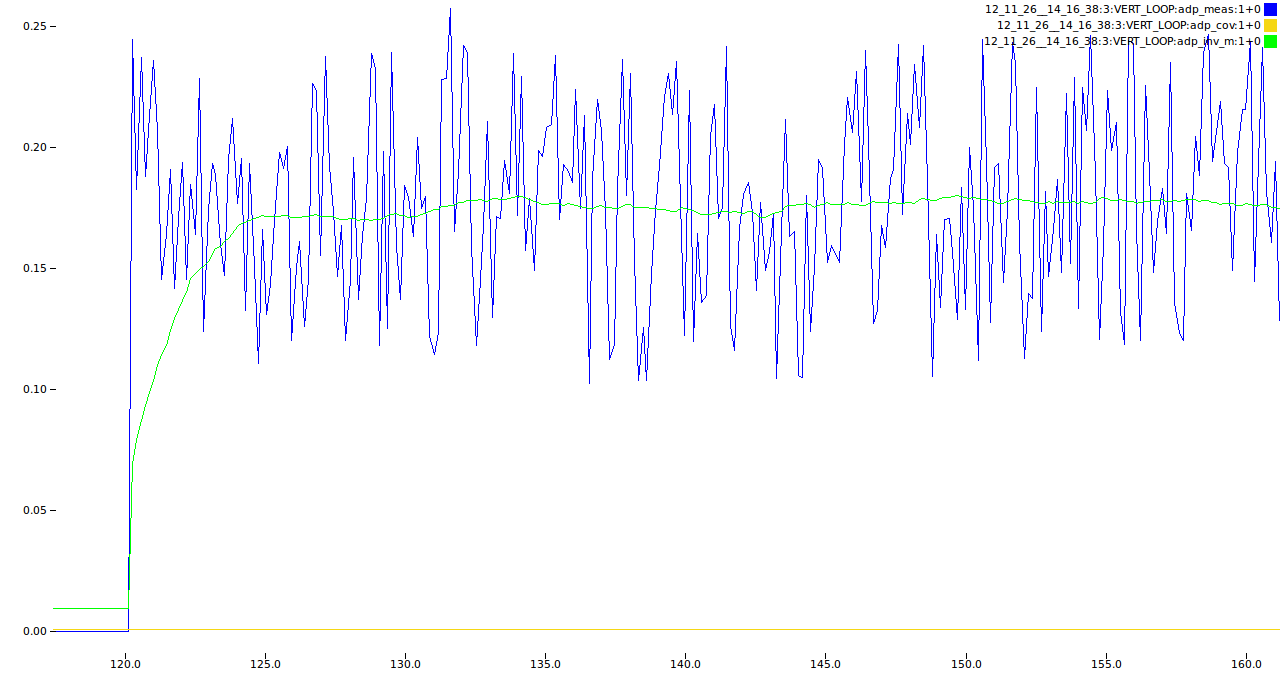
Do you use "NOMINAL_HOVER_THROTTLE" define? If you do, then inv_m isn't calculated using the adaptative controller.
Since your previous message concerning the loss of autorithy I have tested the adaptative controler with success.
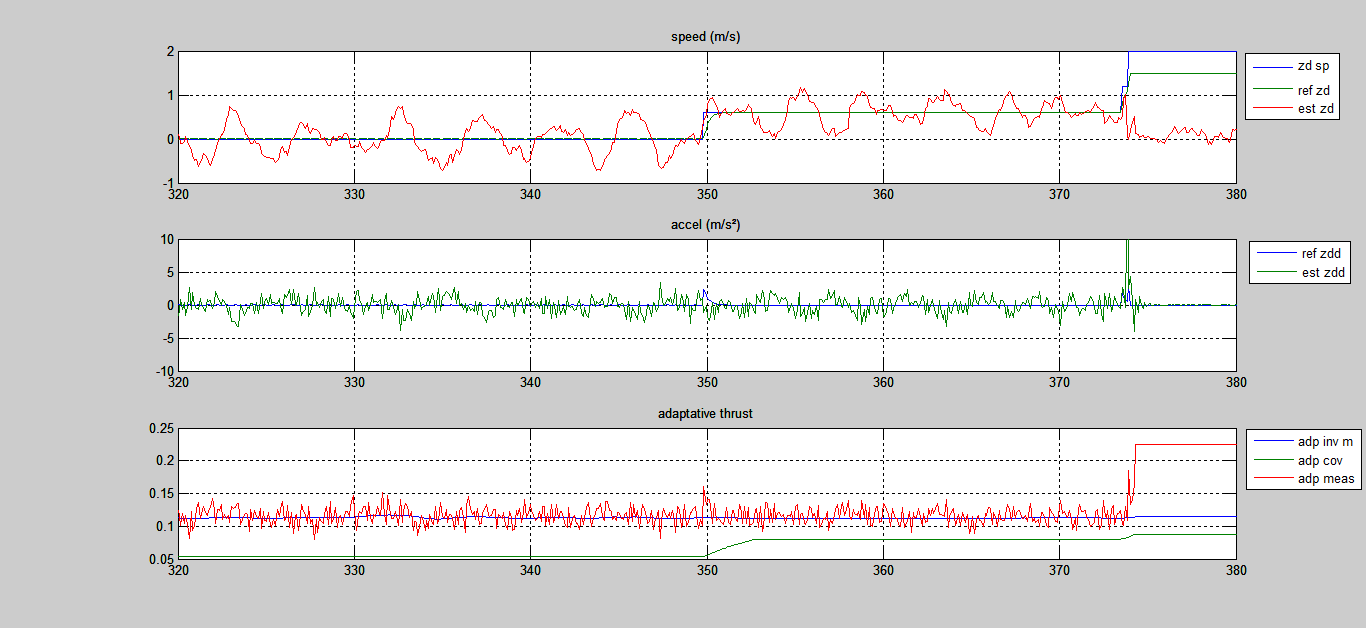
Here is a plot from a landing in nav mode:
As you can see, there is less noise on Z accelerometer than you have on your quadrotor. I would suggest you to reduce vibrations on your IMU before going deeper into the adaptative filter calculations. I hope this helps!
Loïc
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel
{kind=link}